空间站是人类太空探索任务的桥头堡。在其建设、运行和维护过程中,需要执行各种任务。然而,太空环境存在微重力、高真空、强辐射、温差大等恶劣条件,严重威胁着航天员的健康和生命安全。
由于太空机器人不受人类生理条件的限制,可以长时间高质量地执行太空探索任务,这已成为太空探索的重要趋势。在空间站任务中,机器人需要对工具或任务对象进行精准操作,这依赖于对目标的准确跟踪。然而,特殊的空间环境可能会导致目标跟踪数据中出现复杂的非高斯噪声。而传统卡尔曼滤波器在误差信号为非高斯信号时性能会严重恶化,可能导致任务失败。
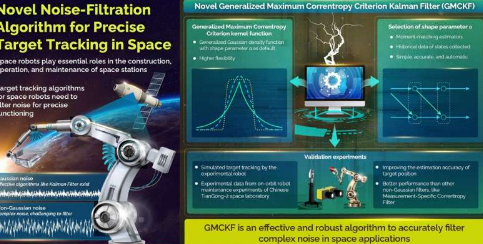
因此,有必要对复杂的非高斯噪声的滤波算法进行研究。在近日发表在《Space: Science & Technology》上的一篇研究论文中,北京工业大学机电工程学院和湖南大学的学者和科学家组成的研究团队提出了一种新的卡尔曼滤波器,称为广义最大相关熵卡尔曼滤波器(GMCKF),以更好地实现在目标跟踪过程中可能遇到的各种形式的非高斯噪声下的性能,提高跟踪精度。
作者首先介绍了Generalized Correntropy,分析了Gaussian kernel和Generalized Gaussian Density的区别。现有研究集中在提高卡尔曼滤波器在非高斯噪声下的性能。最大相关熵准则 (MCC) 在评估非高斯噪声方面显示出良好的结果。
基于MCC的过滤器有很多,可以获取误差的高阶矩,有效过滤异常值。但是,MCC 的默认内核是高斯内核。由于高斯函数的限制,它不能自由地改变相关熵的形状。因此,像最大相关熵卡尔曼滤波器(MCKF)这样的滤波器在一些复杂的非高斯噪声下无法获得良好的性能。
认为利用广义高斯密度 (GGD) 函数的广义最大相关熵准则 (GMCC) 具有更灵活的形式,作者开发了一种 GMCKF 算法,将高斯核替换为 GGD 函数,该函数添加了一个新的形状参数 α 以获得更好的各种非高斯噪声下的性能。此外,作者选择矩匹配估计器(MMEs)来估计参数α,因为它对于参数估计来说足够简单和准确。
然后,在仿真中研究了附加形状参数α的影响和GMCKF参数自动选择算法的有效性。通过仿真发现,通过附加的形状参数α和自动选择算法,GMCKF在各种非高斯噪声下都能取得良好的性能。此外,还进行了地面实验,验证了 GMCKF 算法对目标跟踪的效果。
由于微重力环境,目标可能漂浮在太空中。在这种情况下,太空中的相机等视觉传感器长时间暴露在高能粒子下;图像采集和传输过程中可能存在复杂的非高斯噪声。不受控制的光照、其他浮动物体的覆盖以及复杂的背景也会给目标跟踪带来复杂的非高斯噪声。为模拟空间环境下的目标跟踪,在Singer模型的基础上搭建了实验系统,包括一台6自由度工业机器人(川崎RS10N)、一对双目相机(Imavision MER-125-30UM) ,一个球形目标和一个激光跟踪器。
由于实验室环境中没有足够的复杂噪声,特意在双目相机的测量数据中加入了一些非高斯噪声,以模拟空间站内各种因素产生的非高斯观测噪声。实验结果再次证实,当系统受到各种非高斯噪声的干扰时,所提出的 GMCKF 可以显着优于其他滤波器。也就是说,为了得到更准确的目标位置,可以使用GMCKF算法来过滤目标跟踪中包含的非高斯噪声。
最后,为验证算法在真实环境中的效果,采用GMCKF算法对来自中国天宫二号空间实验室在轨机器人维修实验的实验数据进行处理。实验目的是验证有效滤除特殊空间环境引起的复杂非高斯噪声,有助于机器人提高在恶劣空间条件下自主进行维修作业的能力,顺利完成任务。
实验数据从空间实验室传回地面,可作为真实空间环境下的实时测量数据,利用实际应用数据验证了算法。实验结果表明,GMCKF算法可以帮助机器人更好地定位目标并完成任务。