导读IstitutoItalianodiTecnologia的仿生软机器人实验室的一组研究人员开发了一种新的基于褶皱的软机器人执行器,该执行器可用于各种尺寸,最小...
IstitutoItalianodiTecnologia的仿生软机器人实验室的一组研究人员开发了一种新的基于褶皱的软机器人执行器,该执行器可用于各种尺寸,最小仅为1厘米。在他们发表在《科学机器人》杂志上的论文中,该小组描述了他们的新执行器背后的技术,以及他们在不同环境下对其进行测试时的工作情况。
从事软机器人项目的工程师经常发现自己受到标准气动人工肌肉执行器的限制,由于大量复杂的零件,这些执行器往往只能在给定尺寸下正常工作。在这项新工作中,研究人员为此类执行器添加了一项新功能,该功能需要更少的零件,从而使执行器更小。
气动人造肌肉执行器通过将空气泵入和泵出小气球状囊来工作,模拟肌肉活动。它们不仅可以膨胀和收缩,而且还可以弯曲,因为它们是用树脂制成的。当与其他部分(例如手)结合使用时,人造肌肉可以进行抓握和扭转。为了减少复杂部件的数量,研究人员通过添加褶皱来调整囊。当空气被抽出时,这减小了囊的尺寸,而无需添加其他部件,使它们在更小的设备中有用。研究人员还使用了一种比此类工作中通常使用的树脂更灵活的树脂。
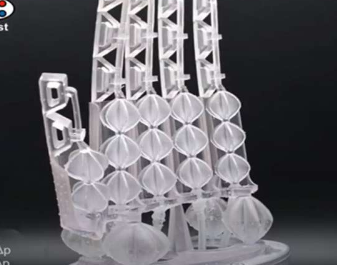
研究人员3D打印了他们的致动器,允许各种尺寸。他们将结果命名为基于GeometRy的收缩和拉长执行器(GRACE)。
他们在不同的情况下测试了GRACE,主要基于大小。例如,他们制造了一个仅1厘米宽的致动器和另一个仅重8克的致动器,将其添加到抓取器中,发现它能够举起8公斤。他们还使用18个不同大小的执行器构建了一个大小接近人手的机器人手。测试表明它能够弯曲手指、转动手腕和转动手掌。