仿生水下机器人具有很多优势,包括强大的机动性和推进效率。然而,由于高昂的物理成本,在真实环境中训练他们的行为具有挑战性。因此,用于训练这些机器人的控制策略的模拟平台将对研究人员有用。
arXiv.org最近的一篇论文提出了一个高性能仿真平台,该平台针对鱼类水下机器人与周围流体环境之间的双向交互动力学。它使用GPU加速的晶格Boltzmann求解器来模拟局部移动参考系中的高性能流固耦合。
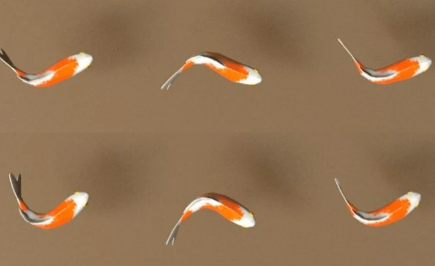
研究人员提出了一种为仿生水下机器人量身定制的算法,该算法可以获得自然而有效的游泳控制策略。最后,提供了一组基准任务来评估和比较不同的学习方法和控制策略。
仿生水下机器人已在许多应用中展示了其优越性。然而,为模拟水下生物行为的各种任务训练他们的智力在实践中提出了许多挑战,主要是由于缺乏大量可用的训练数据以及在真实物理环境中的高成本。或者,仿真被认为是在不同环境中获取数据集的可行且重要的工具,但它主要针对刚体和软体系统。目前,对于与浸没的固体相互作用的更复杂的流体系统,可以有效和准确地模拟机器人训练目的的工作很少。在本文中,我们提出了一个名为“FishGym”的新平台,可用于训练类鱼水下机器人。该框架由一个使用带有蒙皮的关节体的机器鱼建模模块、一个基于GPU的高性能本地化双向耦合流固耦合仿真模块(可处理有限域和无限大域)以及强化学习模块组成。我们利用现有的训练方法适应水下鱼类机器人,并获得了用于多个基准任务的学习控制策略。训练结果以合理的运动轨迹进行展示,并与经验模型以及已知的真实鱼类游泳行为进行比较和分析,以突出所提出平台的优势。一个基于GPU的高性能局部双向耦合流固耦合仿真模块,可处理有限域和无限大域,以及强化学习模块。我们利用现有的训练方法适应水下鱼类机器人,并获得了用于多个基准任务的学习控制策略。训练结果以合理的运动轨迹进行展示,并与经验模型以及已知的真实鱼类游泳行为进行比较和分析,以突出所提出平台的优势。一个基于GPU的高性能局部双向耦合流固耦合仿真模块,可处理有限域和无限大域,以及强化学习模块。我们利用现有的训练方法适应水下鱼类机器人,并获得了用于多个基准任务的学习控制策略。训练结果以合理的运动轨迹进行展示,并与经验模型以及已知的真实鱼类游泳行为进行比较和分析,以突出所提出平台的优势。