剑桥工程师已经展示了机械臂如何通过操纵水面上的表面波来远程控制漂浮物体的行程。利用深度强化学习的最新进展——最适合管理复杂决策的人工智能(AI)领域——该团队提出了一种模拟流体相互作用的方法,提供了一种数据驱动的方法来解决复杂的流体动力学问题。
流体表面上漂浮物体的远程控制在小规模(例如细胞操作)、大规模(例如从小水体中收集漂浮物)和医疗应用(包括转移薄组织切片到显微镜载玻片上进行诊断)。然而,潜在的流体相互作用极难建模。他们的行为受到各种外部因素和内部力量的复杂相互作用的支配,这些外部因素和内部力量无法可靠地进行数学预测。
通过利用机器人设备的精度和可重复性,再加上实验室设置中的深度学习和真实世界的实验,该部门的仿生机器人实验室(BIRL)的研究团队已经能够解决这个问题。他们开发了一种控制框架,可以将浮动物体从一个位置传输到另一个位置。机械臂通过反复试验来学习控制浮动物体所采用的路径。由强化学习教授的“智能代理”决定了最佳策略。结果发表在《科学报告》杂志上。
机器人学教授FumiyaIida说:“启发我们开始这项研究的原因是,在准备用于癌症诊断的显微镜载玻片期间,亲眼目睹了医院技术人员在水上导航漂浮的生物样本。这对于今天的机器人来说是一项非常艰巨的任务,但通过我们的研究项目,我们通过自动化只有熟练的人类技术人员才能做到的事情,朝着解决这个问题又迈进了一步。”
软机器人传感和自我修复研究助理ThomasGeorgeThuruthel博士说:“专业设备目前用于对浮动物体进行小规模远程操作。通常,它们使用磁或光信号进行远程操作。然而,这增加了例如,对设置的限制以及可以控制的材料类型。
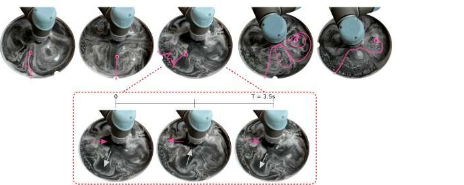
“我们提出了一种方法,通过机械臂执行重复性任务而无需大量反馈。我们使用机器人操纵器定期远程激发水(类似于狗划水从游泳池中取出网球),以生成表面流动是为了将物体从任何起始位置移动到指定的目标位置——并在旋转0°、90°和180°的情况下进行测试。我们发现随着角度和路径长度的增加,观察到的轨迹变得更加不可预测,但平均而言,物体可以被运送到所需的位置。”
研究生大卫哈德曼说:“我们希望通过用超声波或激光雷达传感器(一种遥感技术)代替它来扩大我们的设置。这是可能的,因为强化学习方面所需的唯一信息是漂浮物的起始位置和目标的最终误差。未来,我们还想探索其在废物碎片和溢油处理方面的潜在应用。然而,要实现这一目标还有很长的路要走。在这些实际应用中进行测试和验证。”