随着人工假肢和人机界面等机器人设备越来越多地融入社会,研究人员一直在更深入地研究与手具有相同功能的设备的敏感性。人类的指尖非常敏感。它们可以传达小至40微米(大约是人类头发宽度的一半)的物体的细节,辨别表面纹理的细微差异,并施加足够的力来举起鸡蛋或20磅的狗粮袋,而无需滑倒。他们还可以相对轻松地操纵对象。
工程师们一直在努力模仿这种能力,最终用于机器人或假肢,并取得了不同程度的成功。在密歇根大学,PCKu教授和他的团队最近报告了一种改进的触觉感知方法,可以以高灵敏度检测方向和力。该系统的高分辨率使其特别适合机器人和HCI应用。它的制造也相对简单。
博士生NathanDvořák说:“我们正在弥合人类和计算机之间的差距,所以也许我们可以教机器人如何以更接近我们自身能力的方式感知物体。”
Dvořák是PCKu教授领导的团队的成员,该团队在过去几年一直在开发触觉传感器。他们是第一个使用不对称纳米柱将高度敏感的触觉与方向性相结合的人——因此假肢设备能够更紧密地抓住坠落的物体,或者人机界面可以区分上升和下降运动。
作为概念验证,该团队构建了一个大约指尖大小的传感器,其中包含160万个氮化镓(GaN)纳米柱。使用GaN是因为它能够通过其固有的压电特性测量力,这意味着它能够在受压时产生电荷。
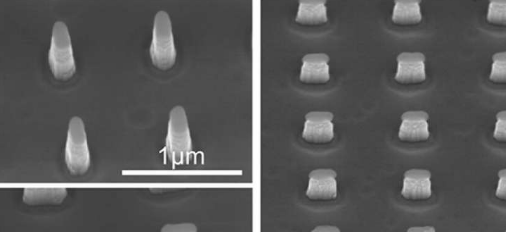
纳米柱的椭圆形状和排列是其成功检测方向性的关键。
最小的单位是纳米柱。每个纳米柱都呈椭圆形,高450纳米,比人类头发的宽度小约1,000倍。每个纳米柱都配备了自己的LED。
纳米柱被分组为矩形、100×150个纳米柱或每个阵列12,500个纳米柱的单个阵列。然后将每个阵列与与其成直角的第二个阵列紧密地分组在一起。这种布置是其检测方向能力的关键。这两个正交阵列称为一个节点。
触觉传感器的概念图。施加到纳米柱上的压力会减少LED发出的光。图片来源:密歇根大学
一个完整的传感器由64个方形节点组成。
当对纳米柱施加力时,它会改变纳米柱发出的光强度,如视频所示。
因为传感器能够确定力的方向,所以它可以提醒未来的假肢设备是否有物体可能会从它的抓握中掉落,需要更紧的抓握。
该系统不需要复杂的电气互连,这需要非常高的制造一致性。它还使用众所周知的易于重复的制造方法。
“而且我们不需要在我们的设备上实现100%的良率,甚至不需要关闭,”Dvořák说。“在我目前的一个设备上,传感器上有160万个纳米柱,即使阵列中25%的纳米柱在制造过程中受损,它仍然有效,因为我们正在检测光强度的变化而不是绝对光强度。”
该传感器能够识别仅4.3μm的物体,使其灵敏度比人类指尖高出近10倍。它可以检测类似于回形针的物体的重量,或大约0.1克。
当前的概念验证使用现成的成像器来检测触摸表面时发生的光线变化。
“我们现在正在努力开发一个完整的系统,”Dvořák说。在使当前系统通电后,他将传感器安装在CMOS成像器的顶部,该成像器将记录光强度的变化,并将其连接到微处理器以进行自动信息处理。
这项研究在NanoLetters上发表的“具有方向灵敏度和高空间分辨率的超薄触觉传感器”中有所描述。