在我们能够创建一个人工智能代理之前还有很长的路要走,该代理可以以与人类相似的效率水平执行多种任务。这将需要积累和研究大量信息数据集,但这可能还不够。目前,只有特定任务的代理表现出非凡的行为,超过了人类的行为。
众所周知,人类儿童在相对较短的时间内学习了大量任务。使用技术类比时,所有这些任务都是按顺序执行的,并使用通用算法进行学习。但在机器学习的情况下,开发一个可以整合所有这些任务的单一代理是一项艰巨的挑战。它可能会消耗大量时间,并且总体而言,最有可能是一个极其昂贵的过程。为了部分解决这些问题,开发了计算机化环境,为代理学习提供真实的体验。
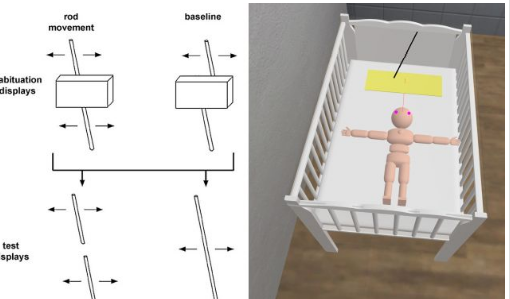
评估实验。(a)评估统一感知的纸棒实验[18]。(b)SEDRo中的纸棒实验模拟。图片来源:研究人员提供/arXiv:2012.14842
最近发表在arXiv.org上的一篇研究论文基于这样一个事实,即婴儿通过与周围环境的互动来学习。这种互动从出生开始,支持儿童的认知发展,包括语言学习。
多年来,研究人员已经开发并研究了几种模拟机器人环境和游戏,但没有一个能够提供婴儿在生命第一年所经历的真实体验。牢记这一想法,开发机器人的模拟环境(SEDRo)旨在创建婴儿代理的通用人工智能模型。
考虑到年龄,模拟了婴儿社交互动的不同阶段。增量开发结合了前一阶段开发的结果。所有这一切都是通过使用一个名为“Motherese”的与孩子互动的母亲代理来完成的。Unity3D游戏引擎用于演示SEDRo。
拟定环境
SEDRo旨在提供一个最小的环境,让婴儿可以体验从胎儿阶段到出生后12个月的计数。SEDRo的关键方面涉及婴儿代理、周围环境和看护人——在这种情况下,是“Motherese”AI代理。模拟环境由各种物体组成,例如家具和玩具,以便婴儿代理可以与它们进行交互。在两种环境(胎儿和产后)中观察到四个发育阶段,即胎儿、不动、爬行和行走。机器学习模型在每个阶段都会体验新的独特功能和特性。
1.代理
代理身体的编程方式与人类儿童的身体类似,并且如前所述,支持可以随着时间的推移进行模拟和分析的各个发展阶段(爬行、步行、抓取食物等)。代理主体被开发为支持64度移动。
-想象
已经在代理内部开发了两只具有双目系统的眼睛。双眼和两个摄像头都有水平、垂直和焦距的自由度,可以复制人类拥有的中央和周边视觉。可选的摄像头放置在头部以产生组合视觉感知。近视聚焦效果也实现了,因为婴儿无法将他/她的视力聚焦到手臂长度之外。
–触觉灵敏度
大约2110个传感器被放置在特工的身体上,每个传感器的密度各不相同。大多数传感器都放置在头部内。每次触摸时,传感器生成“1”,否则生成“0”。生成包含所有传感器状态的稀疏状态向量,并将其作为观察的一部分发送。
–本体感觉
当前关节位置和视觉信息用于评估空间位置和身体部位运动的关。将469个值范围从-1到1的观察值提供给代理的观察值。还包括关节的速度和角速度以了解身体运动。
–内感受
还观察胃内的食物水平。随着时间的推移,这个水平会下降,达到一定的阈值后,宝宝会哭。母代理将开始行动并喂养婴儿AI代理,从而增加饱腹感。
2.建模“Motherese”
场景中包含了母亲角色来照顾婴儿的需求,其中还包括社交互动。
–母亲经纪人
为了开发子代理的智力,它与母代理的互动是必不可少的。母代理是通过分析母子在现实生活中的交互,使用预定义的库构建的。基于真实交互使用预先录制的动作捕捉(Mocap)动画。为了使任务不那么复杂,只观察孩子的前12个月,因此没有开放式的来回互动。所有场景都是在研究工作期间手动构建的。
–与宝宝互动
母婴互动的首要场景是喂养婴儿。监督AI代理以预先定义的时间间隔以及食物水平下降时给婴儿喂食。妈妈在周围喂食和行走时,可以避开障碍物,向宝宝靠近。
婴儿定向语言(IDS)是母亲角色的另一个关键方面。妈妈会用小词和宝宝点头或移动手臂与宝宝互动。由于声音不能直接添加到观察中,因此研究人员使用长度为26的单热编码向量来表示每个时间帧的一个英文字符。
为了共同注意,将不同的物体放在婴儿面前,并在看着它们时提供它们的描述。当婴儿试图触摸或抓住物体时,会提供对发育后期物体的描述。
发展评估
SEDRo的创建者提出了各种实验来评估和跟踪子代理的发展。一个这样的实验包括一个被盒子遮挡的杆的运动。3个月大的婴儿会将其视为两个独立的杆,而较大的婴儿则将它们视为一个整体。本次测试观察模拟婴儿的统一感知。
最后的话
上述研究目前正在进行中。研究人员希望通过在AI代理之间添加新的交互模式来改进该模型。