作为一名机器人工程师,圣母大学电气工程助理教授 Yasemin Ozkan-Aydin 从生物系统中获得灵感。蚂蚁、蜜蜂和鸟类解决问题和克服障碍的集体行为是研究人员在空中和水下机器人技术中开发的。然而,开发能够穿越复杂地形的小型群体机器人面临着一系列独特的挑战。
在Science Robotics 上发表的研究中,Ozkan-Aydin 展示了她如何能够构建多腿机器人,这些机器人能够在具有挑战性的环境中机动并集体完成艰巨的任务,模仿自然世界的同行。
Ozkan-Aydin 说:“腿式机器人可以在崎岖地形和狭小空间等具有挑战性的环境中航行,四肢的使用提供了有效的身体支撑,实现了快速机动性并促进了障碍物的穿越。” “然而,有腿机器人在陆地环境中面临着独特的移动挑战,这会导致运动性能下降。”
Ozkan-Aydin 说,在这项研究中,她假设单个机器人之间的物理连接可以增强陆地有腿集体系统的移动性。单个机器人执行简单或小的任务,例如在光滑的表面上移动或搬运轻物体,但如果任务超出单个单元的能力,则机器人彼此物理连接以形成更大的多腿系统并集体克服问题。
“当蚂蚁收集或运输物体时,如果遇到障碍物,该小组会共同努力克服该障碍物。例如,如果路径中有间隙,它们将形成一座桥梁,以便其他蚂蚁可以穿越——然后是这项研究的灵感来源,”她说。“通过机器人技术,我们能够更好地了解这些生物系统的动力学和集体行为,并探索我们未来如何使用这种技术。”
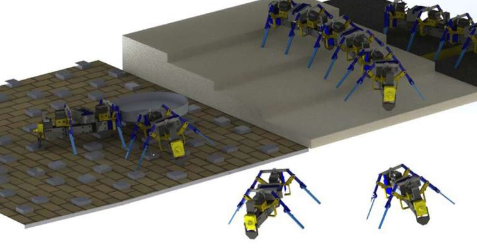
Ozkan-Aydin 使用 3D 打印机制造了长度为 15 到 20 厘米,或大约 6 到 8 英寸的四足机器人。每个都配备了锂聚合物电池、微控制器和三个传感器——一个前面的光传感器和两个前后两个磁性触摸传感器,允许机器人相互连接。四个灵活的腿减少了对额外传感器和零件的需求,并为机器人提供了一定程度的机械智能,这有助于在崎岖或不平坦的地形上进行交互。
Ozkan-Aydin 说:“你不需要额外的传感器来检测障碍物,因为腿部的灵活性有助于机器人直接越过它们。” “它们可以测试路径中的间隙,用自己的身体搭建一座桥梁;单独移动物体;或者在不同类型的环境中连接以集体移动物体,与蚂蚁没有什么不同。”
Ozkan-Aydin 于 2020 年初开始了她的研究,当时该国大部分地区因 大流行而关闭。在打印完每个机器人后,她制造了每个机器人,并与儿子在家中、院子里或操场上进行了实验。这些机器人在草地、覆盖物、树叶和橡子上进行了测试。在刨花板上进行了平地实验,她用绝缘泡沫建造了楼梯。机器人还在粗毛地毯上进行了测试,矩形木块粘在刨花板上作为崎岖的地形。
当单个单元卡住时,会向其他机器人发送信号,这些机器人连接在一起以提供支持,以便在集体工作的同时成功穿越障碍。
Ozkan-Aydin 说她的设计还有待改进。但她希望这项研究的结果将为低成本腿群的设计提供信息,这些群可以适应不可预见的情况并执行现实世界的合作任务,如搜救行动、集体物体运输、空间探索和环境监测。她的研究将侧重于提高系统的控制、感知和动力能力,这对于现实世界的运动和解决问题至关重要——她计划使用该系统来探索蚂蚁和白蚁等昆虫的集体动态。
“对于功能性集群系统,电池技术需要改进,”她说。“我们需要能够提供更多电力的小型电池,理想情况下可以持续 10 小时以上。否则,在现实世界中使用这种类型的系统是不可持续的。” 其他限制包括需要更多的传感器和更强大的电机——同时保持机器人的尺寸很小。
“你需要考虑机器人在现实世界中的功能,所以你需要考虑需要多少功率,你使用的电池大小。一切都是有限的,所以你需要对机器人的每个部分做出决定。机器。”
乔治亚理工学院的 Daniel I. Goldman 合着了这项研究。