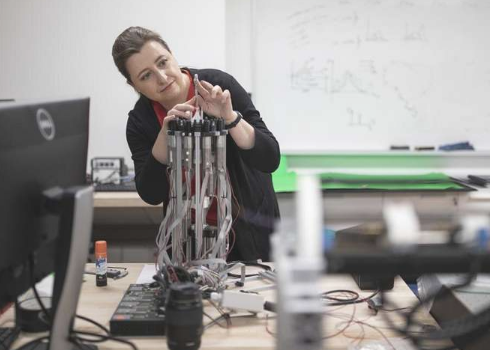
您可能会称其为“动物学”。密西沙加大学(University of Mississauga)的Continuum机器人实验室主任Jessica Burgner-Kahrs和她的团队正在制造直径为几毫米的非常细长,灵活和可扩展的机器人,用于外科手术和工业。与类人机器人不同,所谓的连续体机器人具有长而无肢的身体(与蛇类不同),这使它们能够进入难以到达的地方。
考虑一个需要切除脑瘤的神经外科医生。使用传统的刚性外科手术工具,外科医生必须沿着直线进入大脑,以达到癌肿,并冒着刺穿和破坏重要组织的风险。伯格纳·卡尔斯(Burgner-Kahrs)设想,她的蛇形机器人中的一个机器人将在外科医生的指导下走上一条蜿蜒的路径,围绕着重要组织,但仍然可以到达精确的手术部位。以前无法手术的脑瘤可能突然变得可手术。她说:“它可以彻底改变手术。”
计算机科学家和机械工程师Burgner-Kahrs说,她的实验室还正在开发新一代的,具有传感器并且可以部分自我控制的连续体机器人。外科医生必须使用计算机远程操作机器人,但是机器人将知道如何避开障碍物并识别其目的地。例如,外科医生可以部署这些机器人中的一个来从腹部收集组织样本,或者将抗癌药直接注入肺部肿瘤中。
人体以外也有用途。连续机器人可以滑过喷气发动机的内部,检查其是否损坏。实验室正在试验更加灵巧和可扩展的新颖形式。一种最新的设计具有潜在的搜索和救援应用,其灵感来自折纸:它非常轻巧,并且可以比其他设计延长多达10倍。
为了开发可以在各种医疗和其他应用中安全使用的机器人,Burgner-Kahrs教授旨在回答以下问题:
我们如何控制连续机器人,使其在受限和曲折的环境中更加精确地运动?
我们如何设计人与机器人之间更直观的界面?我们可以实现一个完全自主的机器人吗?
我们如何串使用多个连续体机器人来共同完成一项任务?