在我们的细胞以及最著名的生命形式的细胞内部,存在着多种复杂的化合物,称为“分子马达”。这些生物机器对于活系统中各种类型的运动都是必不可少的,从单个细胞内的蛋白质的微观重排或运输到肌肉组织的宏观收缩。在机器人技术和纳米技术之间的十字路口,一个备受追捧的目标是找到方法,以利用这些微小的分子电动机的作用,以可控的方式执行更大的任务。但是,实现这一目标无疑将具有挑战性。
“到目前为止,即使研究人员找到了扩大分子运动网络的集体作用以显示宏观收缩的方法,但仍很难将这种网络有效地集成到实际机器中并产生足够大的力来致动宏观组件,” Associate解释说。科学技术研究院的平冢雄一教授。
幸运的是,平冢博士与岐阜大学的副教授高田隆弘和大阪大学的森岛圭佑教授合作,最近在寻求将微距与宏连接方面取得了显着进展。在发表于《自然材料》上的最新研究中,该研究小组报告了由两个转基因生物分子马达驱动的新型执行器的设计。他们的生物学启发方法最吸引人的方面之一是,执行器通过简单的光照射就可以从碱性蛋白质中自动组装。在光线照射到给定区域后的几秒钟内,周围的电机蛋白质与称为微管的轨道状蛋白质融合,并排列成类似于肌肉纤维的分层宏观结构。
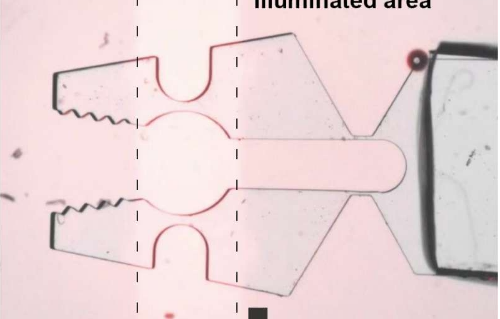
在目标(照明)区域周围形成后,此“人造肌肉”立即收缩,单个运动蛋白的集体力从分子级放大到毫米级。正如科学家通过实验表明的那样,他们的方法对于小型机器人应用来说可能是理想的选择,例如致动显微夹具以处理生物样品(图1)。还演示了其他毫米级应用程序,包括将单独的组件(例如微型齿轮)连接在一起,并为简约的机械臂提供动力,以制造出像昆虫一样的爬行型微型机器人。
该技术的另一个显着之处在于,它与现有的使用光的3D打印技术(如立体光刻)兼容。换句话说,具有内置人工肌肉的微型机器人可以进行3D打印,从而实现大规模生产,从而提高其解决各种问题的适用性。“将来,我们的可打印执行器将成为整个机器人无缝3D打印的急需的'执行器墨水'。我们相信,这种基于生物分子的墨水可以通过打印复杂的骨骼来推动机器人技术的发展。以及机器人进一步类似于活物所需的肌肉成分。”平冢博士说。
对本技术的一种潜在的改进将是找到有效地使人造肌肉收缩的方法(可逆性)。或者,也可以改变本发明的策略,以产生自发的振荡行为而不是收缩,如在微生物的活动纤毛或昆虫飞行的肌肉中观察到的那样。
无论如何,这项研究有效地表明,模仿自然界提出的策略通常是成功的秘诀,正如机器人领域的许多科学家已经发现的那样。