杜克大学的工程师开发了一种无电子设备的完全柔软的机器人,形状像蜻蜓,可以在水中掠过并对环境条件(例如pH值,温度或油的存在)做出反应。原理证明的演示可能是更高级,自治,远程环境哨兵的先驱,这些哨兵用于监视各种可能的问题迹象。
3月25日在《高级智能系统》杂志上对这种软机器人进行了在线描述。
由于其多功能性,软机器人在行业中正在成为一种增长趋势。软部件可以处理易损坏的物体,例如金属或陶瓷组件会损坏的生物组织。软体可以帮助机器人漂浮或挤压到狭窄的空间中,在这些空间中刚性框架会被卡住。
当灵感激发之时,不断扩大的领域就在杜克大学生物医学工程,机械工程和材料科学以及骨科手术教授Shyni Varghese的脑海中。
瓦尔迪曼·库玛(Vardhman Kumar)博士说:“我从机场的Shyni收到一封电子邮件,说她有一个使用自动修复水凝胶的软机器人的想法,该机器人是她的团队过去发明的,能够自动反应并自动移动。” 是Varghese实验室的学生,也是该论文的第一作者。“但是那是电子邮件的范围,而且我好几天都没有再收到她的消息。所以这个主意一度陷入了困境,直到我有足够的空闲时间去追求它为止,Shyni表示愿意它。”
2012年,Varghese和她的实验室制造了一种可自我修复的水凝胶,可在几秒钟内对pH的变化做出反应。无论是水凝胶中的裂缝还是两个相邻的“涂漆”部分,酸度的变化都会使水凝胶形成新的键,当pH恢复至原始水平时,该键完全可逆。
Varghese匆忙编写的想法是找到一种在软机器人上使用这种水凝胶的方法,该机器人可以在水上移动并指示pH值发生变化的地方。她与其他一些创新技术一起发出信号来指示周围环境的变化,她认为自己的实验室可以将这种机器人设计为一种自主的环境传感器。
在同样在Varghese实验室中的博士后研究员Ung Hyun Ko的帮助下,Kumar开始设计一种基于苍蝇的软机器人。经过几次迭代后,这对夫妇决定将蜻蜓定型为带有内部微通道网络的蜻蜓,这些微通道可以通过气压对其进行控制。
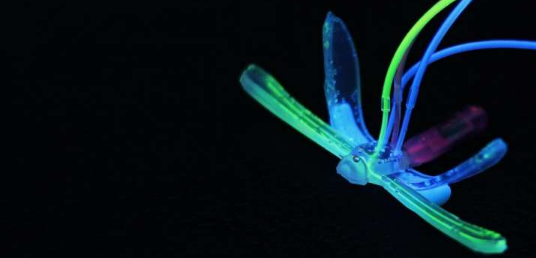
他们通过将硅倒入铝模中并进行烘烤,创建了机体(约2.25英寸长,1.4英寸翼展)。该团队使用软光刻技术来创建内部通道,并与柔性硅管相连。
DraBot出生了。
Ko说:“让DraBot仅使用自动执行器而不使用任何电子装置来响应长距离的气压控制是困难的。” “这绝对是最具挑战性的部分。”
DraBot通过控制进入机翼的气压来工作。微通道将空气带入前机翼,并通过一系列直接指向后机翼的孔逸出。如果两个后翼都放下,气流将被阻塞,DraBot将无处可去。但是如果两个翅膀都向上,DraBot就会前进。
为了增加控制元素,该团队还在靠近DraBot身体的每个后翼下方设计了气球执行器。充气时,气球会导致机翼向上卷曲。通过改变向上或向下的机翼,研究人员告诉DraBot要去哪里。
Kumar说:“当我们能够控制DraBot时,我们感到很高兴,但这是基于生物的。” “生物不仅会自行移动,还会对环境做出反应。”
这就是自我修复水凝胶的用武之地。通过用水凝胶绘制一组翅膀,研究人员能够使DraBot对周围水的pH值做出响应。如果水变成酸性,则一侧的前翼与后翼融合。不平衡不是使机器人按照指示的直线运动,而是使机器人旋转了一个圆圈。一旦pH恢复到正常水平,水凝胶就会“恢复原状”,融合的翅膀分离,DraBot再次完全响应命令。
为了增强其环保意识,研究人员还利用机翼下方的海绵,并在机翼中掺入了对温度敏感的材料。当DraBot在表面浮有油的水上掠过时,海绵会将其吸收并变色为相应的油颜色。当水变得过热时,DraBot的翅膀从红色变成黄色。
研究人员认为,这些类型的测量将来可能会在环境机器人传感器中扮演重要角色。对pH的响应能力可以检测到淡水酸化,这是一个严重的环境问题,影响了几个地质敏感区域。吸收油的能力使这种长距离撇油机器人成为早期发现漏油的理想人选。温度引起的颜色变化可能有助于发现赤潮迹象和珊瑚礁褪色,从而导致水生生物数量下降。
团队还发现了许多可以改善概念验证的方法。无线摄像机或固态传感器可以增强DraBot的功能。创建一种形式的机载推进剂将帮助类似的机器人摆脱油管的束缚。
瓦格斯说:“我可以设想不使用气压来控制机翼,而是可以利用某种合成生物来产生能量。” “这是与我工作的领域完全不同的领域,因此我们必须与一些潜在的合作者进行交谈,以了解可能的情况。但这是从事这样的跨学科项目的乐趣的一部分。”