在鸟类或鱼类成群时,每个实体相对于其他实体协调其位置,从而使该群体作为一个较大的连贯单位移动。另一方面,萤火虫协调它们的时间行为:在一个组中,它们最终全部同时闪烁,从而充当同步振荡器。
但是,很少有实体能够协调其空间运动和固有的时钟。有限的例子被称为“群居者”,它们同时在太空中蜂拥而至,并随时间而振动。树蛙是典型的施虐者:每只青蛙相对于一组中的所有其他青蛙,都会改变其位置和吱吱声的发生率。
此外,青蛙发出嘶嘶声时会改变形状:它们嘴下方的气囊会膨胀并放气以发出声音。这种协调的行为在交配过程中起着重要的作用,因此对于青蛙的生存至关重要。在合成领域中,几乎没有任何材料系统可以使单个单元同时同步其空间组装,时间振动和形态变化。这种高度自组织的材料对于创建自推式软机器人很重要可以组合在一起并协作更改其形式以实现有规律的重复功能。
匹兹堡大学斯旺森大学工程学院的化学工程师现在已经设计了一种自激柔性材料系统,该系统显示出独特的动态自组织模式。除了表现出滑动器的行为外,当组成材料在充满流体的腔室中相互作用时,它们相互适应其总体形状。这些系统可以为制造协作的,自我调节的软机器人系统铺平道路。
该小组的研究结果于本周发表在《国家科学院院刊》上。首席研究员是化学和石油工程学著名教授Anna C. Balazs,以及工程学教授John A. Swanson。主要作者是Raj Kumar Manna,合著者是两位博士后研究员Oleg E. Shklyaev。
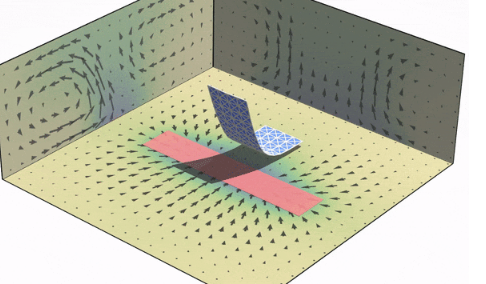
Balazs解释说:“自激振动的材料将非周期性的信号转换为材料的周期性运动。” “使用我们的计算机模型,我们首先在解决方案中设计了微米和毫米尺寸的柔性板,通过自发地发生位置,运动和形状的振荡变化来响应化学反应物的非周期性输入。例如,最初平坦的单板变形变成类似于波浪形鱼尾的三维形状,同时在微腔中来回振荡。”
柔性片材的自激振荡由流体室内的催化反应提供动力。薄板和腔室表面上的反应会引发一个复杂的反馈回路:来自反应的化学能转化为流体,从而使柔性薄板运输并使之变形。结构上发展的薄片继而影响流体的运动,该流体继续使薄片变形。
“真正有趣的是,当我们引入第二张纸时,我们发现了振动结构之间新颖的自组织形式,” Manna补充说。特别地,两片形成耦合的振荡器,其通过流体连通以不仅协调它们的位置和时间脉动,而且同步它们相互的形状变化。这种行为类似于协调它们的相对空间位置和鸣叫时间的树蛙施虐者的行为,这也涉及青蛙形状的周期性变化(喉咙膨胀或收缩)。
Shklyaev说:“复杂的动态行为是生物系统的关键特征。” 东西不仅会聚集在一起并停止移动。类似地,这些板在适当的时间和空间组装,以形成更大的复合动力系统。而且,这种结构是自调节的,并且可以执行单张纸无法实现的功能。”
Balazs说:“对于两张或更多张纸,可以通过改变不同纸的尺寸或在纸上的催化剂涂层图案来控制集体的时间振动和空间行为。” 这些变化允许控制振荡的相对相位,例如,振荡器可以同相或反相移动。
她说:“这些结果非常令人振奋,因为2D图纸会自动变形为3D对象,这些对象会自发地将非振荡信号转换为“指令”,以形成更大的集合体,其形状和周期性运动均受其各个运动部件的调节。”笔记。“我们的研究最终可能会导致生物启发式的计算形式,就像耦合振荡器用于在电子设备中传输信息一样,但是具有自我维持,自我调节的行为。”