导读在一个充满混乱的世界中,我们人类通常认为我们有能力拾取和处理不同重量和大小的物体。我们可能都有过捡起我们认为很重的手提箱并意识到它
在一个充满混乱的世界中,我们人类通常认为我们有能力拾取和处理不同重量和大小的物体。我们可能都有过捡起我们认为很重的手提箱并意识到它完全空了的经验。
我们可以捡起和操纵从未见过的物体的一个关键原因是指尖,它不仅可以迅速增加物体的重量,还可以迅速增加其他细微的特征,例如压力,摩擦力和形状。
与人类先进的触觉见识相反,我们花了数十年时间开发的机器人甚至都没有学到的触觉技能。这一点很重要,因为带有所谓的“触觉传感器”的系统不仅在工厂中越来越多地使用,而且在商店,办公室甚至人们的家中也越来越多地使用。
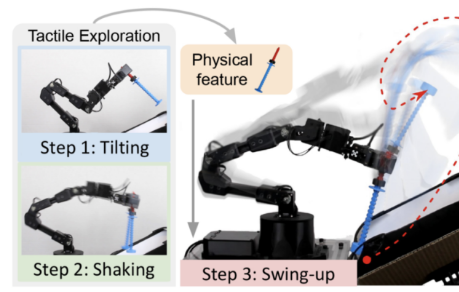
麻省理工学院计算机科学与人工智能实验室(CSAIL)的一个小组正在研究这一问题,并在一份新论文中表明,他们可以使机器人具有足够复杂的触觉,使其可以抓住两个手指之间的新物体,根据感觉来估算其属性,然后将其摆成几乎任何所需的姿势,而无需任何注视。
团队的“ SwingBot”系统可以将对象摆入给定姿势,平均误差仅为17度。(如果没有触觉感测,其准确度将降低两倍。)机器人通过在手指之间摇动物体来判断物体的摩擦和重量,并使用该信息来规划挥杆的时间和轨迹。
CSAIL研究生共同首席作者王绍雄说:“许多实现机器人操纵的方法都涉及一个摄像头,但是如果您仅凭视觉拾取物体,就会错过很多重要的细微差别。”他与包括MIT教授Edward Adelson在内的合作者撰写的有关SwingBot的新论文。“通过我们的方法,我们可以使用触摸来估计对象的物理属性。”
研究人员说,这种系统对于寻求更具成本效益的触觉机器人的组织将很有用。CSAIL团队使用了 由阿德尔森(Adelson)开发的触觉传感器GelSight,该传感器可提供高清分辨率和低成本组件。