国际和范德比尔特大学的研究人员之间的合作正在帮助更新的尝试和真正的医疗技术,为21日 的世纪。智能自主的磁性挠性内窥镜的发展有望使结肠镜检查变得更安全,更轻松,应用更广泛,价格更便宜。 在《自然机器智能》杂志上发表了 文章“通过智能和自主的磁性操纵实现结肠镜检查的未来” 。
尽管数以千万计的结肠镜检查的在美国和欧洲进行,每年-和过程的有据可查的检测成功, 早期 大肠癌,结肠炎和克罗恩病-多一无所知的不舒服和复杂的程序超过有所改善 50年。患者 担心 有关 的 疼痛和镇静 伴随 的过程, 只有一小 数量的医生进行广泛的培训,学习如何正确操作 的 复杂和不符合人体工程学的 结肠镜检查 系统小号。
基思 Obstein,医药和机械工程系的副教授, 和 彼得 Valdastri,机械工程和机器人学和英国利兹大学自治系统当前的椅子前范德比尔特助理教授, 已经 花费了十多年 与各研究生和博士后研究人员 开发荷兰国际集团 的 MFE 。
研究人员确定,重新设计系统的最佳方法是创建一种使用磁铁将内窥镜拉动而不是推向目标位置的机制 。 Obstein解释说,通过在设备的前端添加内部磁体(以及摄像头和治疗通道的位置)以及连接到体外机械臂的磁体,可以将内窥镜的精度控制到五毫米实时六度
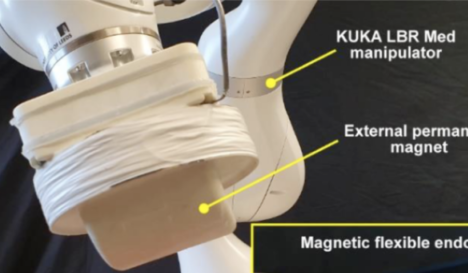
机器人磁性柔性内窥镜系统概述。磁性内窥镜(右下)配有内窥镜摄像头,吹入通道和工作通道。照明由LED提供。KUKA LBR Med机械臂用于操纵外部永磁体。内窥镜视频馈送投影到带有图形界面的监视器上,该图形界面显示诸如相对机器人速度和磁距等参数。图片来源:范德比尔特大学
在一系列的实验中,他们 确定 这两个 新手和有经验的操作者可以进行半自动nomous导航结肠镜检查,其中运营商和机器人 程序一起工作,effici ently与小挫折。
“这项工作为我们如何思考除结肠镜检查之外的复杂医疗程序的教学和可及性提供了新的范例。随着自主和智能医疗设备的部署,这项工作将成为运营商和更多病人为中心的安全,” Valdastri 说。它还有望增加早期癌症治疗的可用性。
与自治级别关联的控制层的示意图。在没有可用自治权的第一层中,用户尝试以5个自由度(DOF)手动控制机器人末端执行器,以尝试操纵MFE。在第二层中,用户控制内窥镜,系统通过考虑定位信息和磁场相互作用来执行机器人的适当运动。在第三层中,用户可以对内窥镜进行离散控制,可以自动检测并跟踪内腔。图片来源:范德比尔特大学
范德比尔特外科工程学院进行了大部分工作 。“ VISE 有助于 协调我们的 合作以及临床医生和工程师之间的持续参与。 许多 是彼得,我已经与我们的合作伙伴培养的关系 是 得益于研究所的 创新和协作精神,” 说 Obstein ,也是在教师子公司 虎钳。
凭借 超过24种出版物和 四项发明专利申请 至今, Obstein 和 Valdastri 会 比较 的 MFE 在2021年通过人体试验对常规结肠镜检查程序。